| Головна |
| «« | ЗМІСТ |
|---|
Роботи прийшли в наше повсякденне життя не більш як півстоліття тому. Завдяки промислового застосування і комерційної прийнятності були розроблені роботичних пристосування для виконання різних маніпуляцій не тільки в індустріальній, побутовій сфері, але і в медицині. В останні десятиліття медичні технології стрімко розвиваються, особливо в хірургії. Великим досягненням нового тисячоліття стали розробка та впровадження роботизованих систем для виконання лапароскопічних операцій.
Станом на час складання підручника єдина така система, схвалена Управлінням з контролю за продуктами харчування і лікарськими засобами США, - це система da Vinci, яка проводиться в штаті Каліфорнія.
Найперші згадки про механізованих пристосуваннях-автоматах сягають своїм корінням до Стародавньої Греції. Легенда свідчить, що в 400 р. До н.е. е. Архіт з Арснтума розробив механічних самохідних птахів, здатних літати на відстань до 200 метрів. Наступна згадка про винахід механічної машини датується 1495, коли знаменитий італієць Леонардо да Вінчі створив свого війна-робота, здатного виконувати руху верхніми кінцівками, які утримують бойовий меч. Не випадково в подальшому ім'я da Vinci присвоїли першої роботічсской установці.
Перше використання робота в медицині відбулося в 1985 р, коли доктор Й. С. Квох і співавтори продемонстрували виконання стереотаксичної біопсії головного мозку під контролем комп'ютерної томографії за допомогою роботизованої системи PUMA 560. робот PUMA 560 (Programmable Universal Manipulation Arm), розроблений В. Шсйнманом в компанії Unimation, володів шістьма ступенями свободи і був першою дійсно керованої роботизованою «рукою».
Виробляючи точні і врівноважені руху, які можна порівняти з рухами руки людини, PUMA 560 був основоположником роботизованих технологій в медицині.
У 1980-х рр. американські вчені С. Фішер і Дж. Роузен запропонували технологію «віртуальної присутності» хірурга для виконання маніпуляцій роботизованими руками, коли хірург знаходиться за багато сотень і навіть тисяч кілометрів від пацієнта. Протягом наступного десятиліття технологія «віртуальної хірургії» була інтегрована в лапароскопію.
Концепція віддаленій (дистанційній) хірургії також використовувалася Управлінням перспективного планування оборонних науково-дослідних робіт Міністерства оборони США. Їх метою було створення пристрою для виконання складних високоспеціалізованих оперативних втручань на поле бою, на кораблях і підводних човнах, коли хірург знаходиться в безпечному місці в тилу або на материку, керуючи установкою - після її підключення до пацієнта асистентами - опосередковано.
У 1995 р ліцензія для оригінальної хірургічної системи була придбана Ф. Молл, Р. Янджі і Дж. Фройнд, засновниками Intuitive Surgical Проект але тиражування розроблених роботичних пристроїв був визнаний комерційно вигідним. У 1997 р за допомогою хірургічної системи da Vinci виробництва Intuitive Surgical в Бельгії була виконана перша робот-ассістірован- ная ланароскоіічна холецистектомія.
Перша оригінальна система da Vinci складалася з консолі хірурга і трехрукой системи приводів для інструментів. У 1999 р була випущена інша роботизована система - ZEUS, відрізняється від da Vinci конструкцією консолі хірурга. При використанні цієї системи, сидячи за пультом управління, хірург одягав спеціальні окуляри для створення тривимірного зображення. У 2001 р згадана роботизована система була вперше використана для проведення «віртуального» хірургічного втручання - лапароскопічну холецистектомію виконали пацієнтові в Страсбурзі (Франція), причому хірург знаходився в Нио-Йорку (США).
З моменту свого випуску перша роботизована система da Vinci зазнала безліч модифікацій. До системи маніпуляторів робота додалася додаткова «четверта рука», що дозволяє хірургу керувати трьома інструментами під час операції. Удосконаленню піддалася і система огляду, яка забезпечує хірургу тривимірне зображення з високою роздільною здатністю.
З 2000 р (коли була отримана ліцензія на виконання операцій за допомогою роботізірованнной системи da Vinci) в світі було продано більше 2500 роботичних установок, близько 30 з яких застосовуються на території Росії. З 2001 р в світі було вироблено понад два мільйони оперативних втручань з використанням роботизованих систем в кардіохірургії, ортопедії, загальної хірургії, торакальної хірургії, урології, гінекології та т. Д.
сучасна система da Vinci складається з ергономічною консолі хірурга, стійки з чотирма інтерактивними роботизованими руками, системи огляду In Site і патентованих інструментів Endo Wrist, мають сім ступенів свободи. можливості інструментів EndoWrist значимо перевершують функціональні можливості людської руки, що відкриває нові перспективи при проведенні втручань в невеликих обмежених анатомічних просторах.
Консоль хірурга (рис. 30.3):

Робогічна стійка:
- установка має чотири роботизовані Мал. 303. Консоль руки - три інструментальні і одну з ендоскопом,
хірурга які управляються рухами хірурга;
Інструменти для проведення роботичних операцій (рис. 30.4):
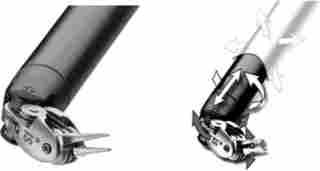
Мал. 303. Вид ножиць з набору інструментів для роботохірургії
Можливості та переваги хірургічної системи da Vinci. роботизована система da Vinci дає хірургу кращу візуалізацію, вправність, точність і керованість, дозволяючи виконувати операцію швидше і з меншою кровопо гсрей, а нерідко - майже безкровно.
Привід інструментів системи da Vinci оснащений системою, яка блокує тремор рук, і дає оператору можливість швидко навчитися рівноцінно працювати обома руками, що особливо цінно під час роботи в невеликих обмежених анатомічних просторах. Незаперечні переваги малоінвазивного роботичних доступу: косметичность, відсутність необхідності в застосуванні наркотичних (а часом і ненаркотичних) анальгетиків після операції, короткий післяопераційний ліжко-день і швидка реабілітація пацієнтів, мінімальна крововтрата, мінімальна кількість ускладнень.
Ергономіка роботохірургічної системи. Під час операції хірург сидить, попередньо подстроив консоль під свої ваго-ростові показники (рис. 30.5). Важливим плюсом є відсутність необхідності в обробці рук хірурга. система da Vinci дає природне вирівнювання очей і рук на хірургічної консолі, що забезпечує кращу ергономіку, ніж традиційна лапароскопія. Те, що роботизовані руки системи da Vinci тримають камеру і інструменти у висячому положенні, потенційно зменшує скручує момент на черевній стінці, травму пацієнта, стомлюваність хірурга і його залежність від асистента.

Мал. 30.5. Робоче місце хірурга та асистента
Набір інструментів для системи da Vinci (Рис. 30.6) включає різноманітність затискачів, голкотримач, ножиць, монополярних і біполярних електрохірургічних інструментів, ультразвукових ножиць та інших спеціалізованих інструментів (всього понад 40 типів інструментів діаметром 5 і 8 мм).
Кожна роботичних операція проходить наступні стандартні етапи:

Мал. 30.6. роботичних інструменти
Сьогодні роботичних система da Vinci широко використовується в хірургії, гінекології, урології, лікуванні онкологічних захворювань кишечника, шлунка, матки, шийки матки, передміхурової залози, нирок. Однією з серйозних і поки не вирішених в більшості країн світу проблем цієї технології залишається її дорожнеча. Дана обставина стримує більш широке поширення роботохірургії.